基于Simulink的VAV空调系统控制优化
合肥工业大学土木与水利工程学院建筑环境与技术工程系 金朝 周沛 王松杰
【摘 要】变风量空调系统(VAV)的控制方式目前多采用PID控制,当房间负荷变化不大时,该方法具有一定的优势,而当房间负荷变化较大且频繁波动时传统的PID控制会导致系统末端不能快速响应,如超调量大、调节时间变长、温度波动较大等问题,造成风量与房间温度的失调,进而影响室内人员的热舒适。本文利用Simulink软件对某VAV空调系统进行建模,采用常规PID控制、模糊PID控制、MPC控制三种不同的控制算法,对比分析了房间温度变化的动态性能指标,结果表明采用MPC控制和模糊PID控制可以对复杂多变的室内负荷做出快速响应,减少系统的频繁启停,提高系统的稳定性与控制精度,进而改善室内的热舒适。
【关键词】Simulink 模糊PID MPC VAV空调系统
0 引言
VAV(Variable Air Volume变风量)空调是通过改变送风量来调节房间温度的空调系统,具有节能及舒适性等优点。一般的VAV空调系统采用PI控制器的定静压控制,根据设定温度和实际温度的偏差来调节阻尼器,引起的静压变化令变频器改变风机转速,进而改变风量[1]。PID控制是变风量空调系统最常见的控制,但是大部分PID控制难以达到用户期望的要求[2]。为了提高控制性能,相关学者基于PID控制提出了新的算法:基于模型自我整定的辨识法、基于规则的模糊PID算法、基于神经网络的PID控制器、基于蚁群算法的PID控制器和基于支持向量机的PID控制器等[3]。李卓函[4]等设计出了基于相关系数辨识的PID自整定控制器,并通过温控实验证明了该方法具有良好的效果。程贝贝[5]等人设计了VAV空调系统RBF神经网络PID控制器,经过实验证明了控制器的有效性和节能型。姚瑶[6]等人根据蚁群算法改进PID控制器,并对变风量空调的二阶系统进行仿真,发现基于蚁群算法的PID控制器超调量更小、响应速度更快。为了改善系统性能,施媛波[7]提出一种基于支持向量机的PID控制器参数整定方法,将PID控制的参数作为支持向量机的输入,实现PID参数在线调整的功能,并通过实验证明了基于支持向量机PID控制器参数在线调整的有效性,同时输出响应曲线的效果更好。本文以某VAV控制系统为研究对象,采用Simulink仿真软件,通过对比三种不同的控制算法:常规PID控制、模糊(Fuzzy) PID控制、MPC(Model Predictive Control)控制,分析比较系统对室内温度控制的动态性能指标,从而提高系统的稳定性与控制精度。
1 工程概况
本文以合肥某实验中心作为研究对象。该实验中心总面积约为227m3,包括实验室、办公室、走廊、展览室、员工宿舍等。空调系统采用一台全变频风冷热泵机组进行供冷与供热,会议室、办公室和实验室采用全空气空调系统,每个房间各安装一个VAV控制末端。实验中心整个空调系统采用DDC控制[8],同时配备有中央监控系统,可以实现对室内参数及空调系统运行参数的实时监测。
VAV末端的控制策略采用定静压控制,定静压控制运用的是前馈控制,最先是通过改变风阀开度调节送风量,风阀的变化会导致管内静压的变化,测量风管内最不利点的静压与设定的静压相比,所得的差值信号通过变频器,再由变频器调节风机转速,进而调节管内静压。因此房间所需的风量就是风阀开度通过静压这个媒介不断调节风机转速,得到需要的送风量[9-11]。
通过对空调系统的运行情况进行分析发现:会议室整个8月份的VAV空调开启的时间和次数比较少,仅有4天近乎是全天开启。当房间负荷波动较剧烈时,温度一直控制不到设定温度,且房间温度控制的反应明显不够迅速,从而导致较长时间的过热或过冷,影响人员舒适度。如图1所示,在8月8日这一天,根据送风温度曲线可以判断空调从上午8:00到下午18:00基本处于开启状态。房间的设定温度是25℃,但是房间的实际温度却不能稳定在设定温度线上。从上午11:00到下午13:30这个阶段,房间温度处于过热状态;从下午13:00到下午18:00点,房间温度一直处于过冷状态,可以看出PID控制精度还有进一步提升的空间。
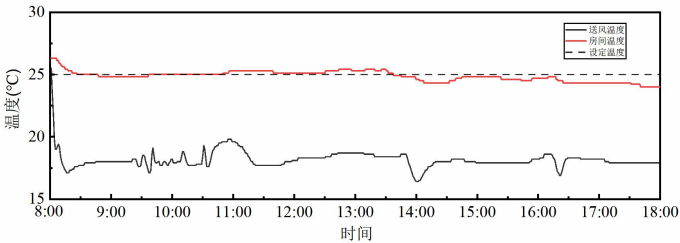
图1 8月8日房间温度控制情况
2 PID算法的改进
此处定静压控制的算法是PID控制,由于PID控制是对于控制输出的线性调节,而实际的空调系统则是非线性的,PID的三个固定的参数无法满足实际空调系统的调节[12]。为了满足空调系统的非线性特征,引入了根据实际情况粗略在线调整参数的模糊PID算法。此外,为了避免空调系统控制中出现大的延迟而导致的房间温度的过冷和过热,引入模型预测控制MPC控制算法。以下分别对PID控制、Fuzzy PID控制和MPC控制进行简单描述。
2.1 PID控制
PID控制称为比例、积分和微分控制,是目前最常用的控制器。其基本原理是设定值和实际值的差值通过比例、微分和积分处理后,累加得到的数值就是所需的控制量。由于PID控制属于典型的无模型控制,不要求精确的数学模型。可以通过调节自身三个参数来使满足输入和输出的需求,此时PID自身就变成了就该输入和输出而言的数学模型。因此PID控制最重要的就是三个参数值,参数值是否合适影响控制结果的响应。目前常用的PID整定技术有Ziegler-Nichols整定法、临界比例度法、衰减曲线法、试凑法、理论整定法等。被控对象的数学模型确定了以后,可以通过以上整定方法近似得到PID三个控制参数。本次模型的PID参数通过整定后参数为:KP=8,Ki=0.3,Kd=-3。
2.2 Fuzzy PID控制
由于外界因素的干扰和被控对象的变化,实际的空调系统常处于一个非线性的状态,从而使得最初整定得到的PID参数不再适用。因此,需要一个能使得PID三个参数能随着情况变化自我整定的算法,使得参数在非线性的条件下也能非线性的自我调节,时刻保证参数最优。本文选取了比较常见的模糊PID控制算法来改进原有的PID算法。
模糊PID是结合模糊控制规则和PID控制原理的产物。当被控对象模型和参数发生改变时,原有的PID参数不再适用,这时模糊PID可以通过人工设置的规则将PID的参数进行在线修正。这些人工设置的规则是根据专业人员对实际情况的长期总结而得出的结论,是凭经验对参数的粗略估计[13-14]。模糊控制的具体步骤是:
1)通过设定值和反馈值得到控制误差e和控制误差变化率ec;
2)选择合适量化因子,将e和ec转化为模糊控制器的输入E和EC;
3)将E和EC模糊化,转化成固定的模糊值E*和EC*;
4)通过模糊规则得到对应于每个E*和EC*的模糊输出C*;
5)对模糊输出C*去模糊化得到精确输出U*,去模糊化的方法有最大隶属度法、重心法等;
6)通过因子将通过模糊控制器得到的精确输出转化为实际控制量u。
根据上述内容可知,模糊控制直接得到的是一个模糊输出,而模糊PID控制是通过模糊控制得到Kp、Ki、Kd的三个模糊值。相对于传统固定的PID参数,模糊PID实现了参数粗略自整定,综合拥有PID和模糊控制的优点。根据PID控制误差响应曲线进行调节,确定合适的量化因子、比例因子、三个参数变化范围和模糊控制规则,在Matlab中调用模糊控制模块,编写模糊控制程序后进行仿真。基于Simulink设计的会议室模糊PID控制器如图2所示:
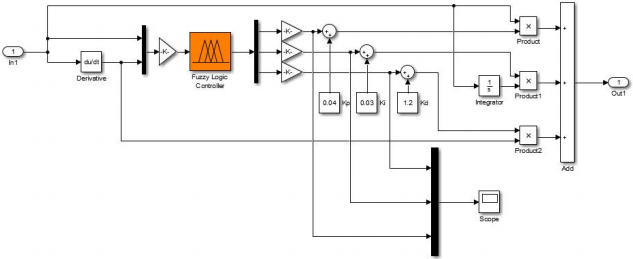
图2 会议室模糊PID控制器
2.3 MPC控制
MPC(Model predictive control)是通过对下一时刻的输出进行预测并提前做出相应来实现调节。线性MPC本质是求解一个二次规划问题,先完成系统优化,再进行跟踪。目前大多数先进的控制都是基于MPC算法的多输入多输出控制,它可以解决PID控制存在的变量之间相互耦合的特点,适用约束条件、大纯滞后、非最小相位和非线性过程[15-16]。MPC控制主要由以下两部分构成:基于模型的预测和滚动优化。模型的作用在于预测下一时刻的期望值,根据k+1时刻的设定输出和k时刻状态预测k+1时刻的输出,使其尽可能接近k+1时刻的设定值。然而,由于外部干扰,预测输出和实际输出存在差异,根据这个偏差值求解得到响应的下一时刻应有的控制量,将控制量的第一个分量作用于当前采样时间,来消除这个偏差。下一个采样时间重复上述过程。因此优化是每个采样时间都有的离散型优化,滚动式向前推进。
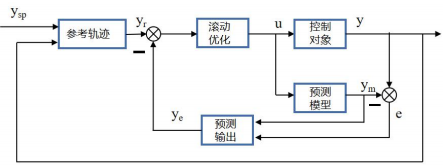
图3 MPC控制结构原理图
图3为MPC控制结构原理图,其中ysp是系统设定值;yr是参考轨迹;u为输出;y为实际输出值;ym为模型输出;ye为预测输出。如图所示,在单位采样时间里,根据设定值ysp和当前实际输出值y得到输出的参考曲线yr;这个参考曲线与预测曲线有个偏差,偏差通过滚动优化转换为控制量来控制被控对象,使得预测输出与参考输出之间的误差尽可能小。而下一时刻的预测输出ye是基于当前模型输出ym和模型输出与实际输出的偏差值e得到的。将得到的控制状态量的第一个元素作用于系统,在下一个采样时间重复上述过程,不断优化[17][18]。
MPC最后形成的问题基本上是一个二次规划问题,利用损失函数来求未来控制量,利用二次规划问题使得损失值最小,得到所需的未来控制量。其通用优化问题的模型为:
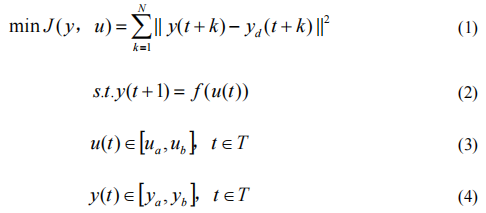
目标函数表示系统的状态y(t+k)和期望的状态yd(t+k)在未来N个时间内都要尽可能接近。约束(2)表示被控对象的动态特性,约束(3)和(4)表示控制量u(t)和状态量y(t)受一个上下线的约束。
在Matlab/simulink中编辑MPC模块,设置合适的参数。首先设置样本时间,样本时间太大无法对干扰做出反应,太小会导致过多的计算量,样本时间约介于开环系统的响应的上升时间的十分之一和二十分之一之间的范围比较合适。由于开环系统响应时间约为20s,本次设置样本时间为1s。一个周期预测未来的时间步长称为预测范围,表示控制器对未来的预测程度,大概为20到30个样本,本次设预测时域为20s。控制范围内是优化器优化的参数,表示控制移动时间步长的次数,通常只有前几对控制动作会对预测的输出行为产生重大影响,过多只会增加系统的复杂性,选择控制范围最好的经验就是将其设置为预测范围的10~20%,本次设为2s。也可以运用MPC模块的自动调节功能,调节至响应最理想的状态,此时的参数即为最优参数。
3 控制仿真与结果分析
以该会议室为例进行控制仿真建模,此处模拟的是夏季VAV系统运行状态,房间的VAV BOX处于常开的状态,其面积约为33m3。变风量末端由两台最大风量为0.17m3/s、最小风量为0.024m3/s的VAV BOX构成,建模时将该房间的变风量系统合并为一台最大风量为0.34m3/s、最小风量是0.048m3/s 的VAV BOX。结合会议室的空调系统,用Simulink建立的基于PID的末端控制如图4所示,VAV末端控制采用串级控制。设置仿真时间为2000s,设定房间温度为25℃,负荷变化采用随机正态分布,10s变化一次,平均值为2kW。
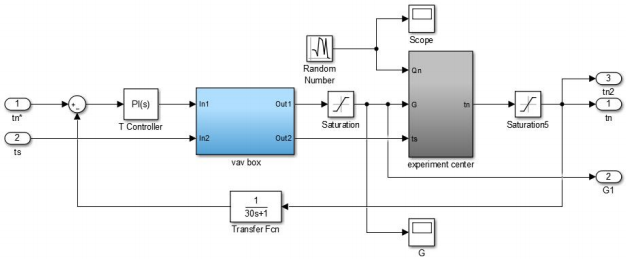
图4 会议室VAV末端控制模型
采用PID、Fuzzy PID和MPC分别控制房间温度,得到房间温度和风量控制响应如图5和图6所示:图5表示了房间温度随着负荷变化的响应曲线,可以看出运用PID控制的室内温度不易收敛,震荡较明显,且调节时间为1800s,调节时间长势必会影响室内人员的热舒适;而模糊PID对温度曲线的特能改善了很多,超调量为4.8%;MPC控制的曲线能迅速收敛,超调量4%。表1给出了房间温度响应曲线特性表,调节时间直接反映了控制系统达到控制温度所需要的时间,调节时间越短,达到热舒适所需要的时间就越短。通过对比发现,Fuzzy PID控制算法的调节时间最短为550s,而常规PID控制则需要30分钟才能使控制温度达到稳定状态。模拟结果表明Fuzzy PID与MPC控制均优于常规PID控制。
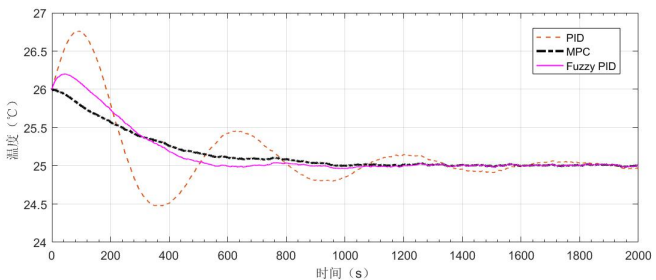
图5 房间温度响应曲线
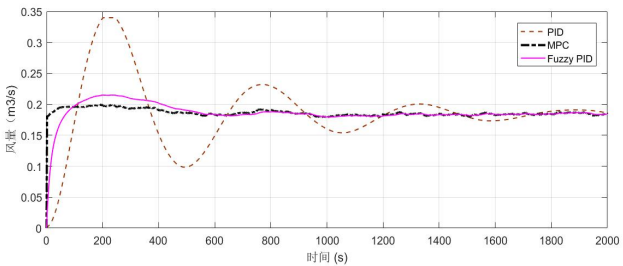
图6 房间送风量响应曲线
表1 温度响应特性分析

用Simulink模拟系统物理参数变化的房间温度响应。模拟工作时间是从上午8点至下午6点;令设定温度在上午8:00~13:00之间为25℃,下午13:00~18:00点为26℃;房间内的空气比热容从0.9~1.5kJ/(kg·℃)变化;房间负荷设定在0~4KW随机变化,如图7所示;
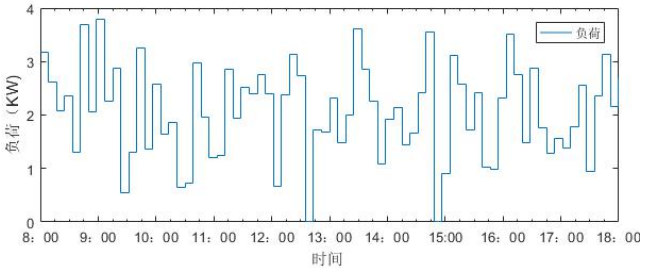
图7 会议室一天冷负荷变化
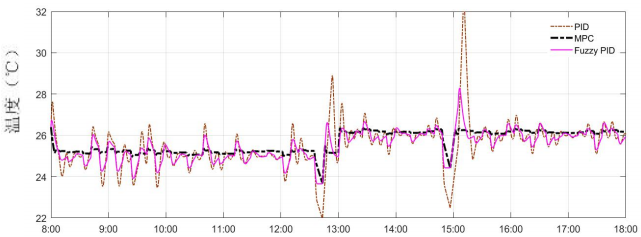
图8 不同控制算法下的房间温度响应
Simulink运行结果表明,PID控制的波动幅度最大,控制效果最差,在下午1点前和下午3点左右,PID控制的温度响应曲线波动剧烈,最高超调量有6℃。;Fuzzy PID控制对波动的情况略有改善,Fuzzy PID控制的温度相应曲线和设定值的误差的绝对值不大于1℃;;MPC控制控制效果最好,MPC控制的温度相应曲线和设定值得误差的绝对值不大于0.2℃,基本无超调。先进的算法控制相对于传统PID控制最大的改变就是超调量更小,除去在下午1点前和下午3点左右的剧烈波动,其他时间PID控制的温度相应曲线和设定值得误差的绝对值不大于1.5℃。系统发生剧烈波动的时刻出现在下午1点前和下午3点左右,通过观察发现该两个时刻的负荷为0。但由于系统的延迟作用,负荷作用于传感器周围空气温度需要一定时间,负荷为0时传感器检测到的还是上一时刻的房间温度值。此时的送风量也是对应于该时刻的送风量,因此会造成房间温度的过冷。等到下一时刻,温度传感器检测到房间温度低于设定值,通过变频器调节风机来降低送风量来实现房间温度的回升。由于送风量不能为负数,此时即使风阀为全关状态也无法改变负荷为0状态下的过冷现象。因此在13:00前和下午3点左右出现的过冷现象与控制效果无关,究其原因归结于系统信号传递的延迟性。
综上,面对负荷变化较大且波动较频繁的房间,常规的PID算法控制精度不高,送风量容易偏高或偏低,从而导致房间温度的过冷或过热。而MPC可以很好的解决响应超调问题,但是对于房间温度响应的过冷现象,只能适当降低其误差的绝对值,调节时间没有明显减小,过冷现象依旧存在。
4 结论
从三个控制算法对房间温度的控制效果来看,Fuzzy PID 和MPC的控制效果相对于PID控制均有改善,采用MPC控制和模糊PID控制可以对复杂多变的室内负荷做出快速精准的响应,减少系统的频繁启停,提高系统的稳定性与控制精度,进而改善室内的热舒适。模糊PID控制虽然能粗略的调节PID参数,但是调节值的数量和调节能力有限,并且模糊PID的规则编制特别依赖专家人工经验,对象模型不同编制内容也不一样。MPC控制效果更好,尤其可以处理多输入多输出的系统,在非线性处理上也有优势,缺点是受限于慢变的系统,对微处理器的运算速度要求较高。对于模拟中0负荷情况下出现的温度曲线波动,是由于系统的延迟作用导致的,但是系统延迟一般不可避免,现实中由于房间的蓄热能力更强,不可能出现温度突增的情况。模拟结果显示新的控制算法相对于PID控制在对室温控制精度上确有改进,风阀开度和送风量调节更加精准对人体舒适度影响较小,建议优先采用MPC控制算法。
参考文献
[1] 陈炯德,王子轩,姚晔, 等.变风量空调系统用非线性模型预测控制方法研究[J].制冷学报,2019,40(6):62-69.
[2] 刘玲玲.PID参数整定技术的研究及应用[D].河南:郑州大学,2010.
[3] 刘金琨.先进PID控制 MATLAB仿真(第2版) [M].北京:电子工业出版社,2004.9
[4] 李卓函,孟祥泉,王峰, 等.基于相关系数辨识的PID自整定控制器[J].仪表技术与传感器,2011,(4):83-86,96.
[5] 程贝贝,任庆昌,白燕.VAV空调系统RBF神经网络PID控制器的设计与实现[J].中国电子商务,2011,(2):110-111.
[6] 姚瑶,李曼珍.蚁群算法在变风量空调控制系统中的应用研究及仿真[J].工业控制计算机,2014,(8):70-71.
[7] 施媛波.支持向量机在PID控制器参数整定中的仿真研究[J].计算机仿真,2010,27(12):203-206.
[8] 李淋淋.变风量(VAV)空调系统的DDC控制[D].陕西:西安建筑科技大学,2003.
[9] 唐志伟,王刚.定静压控制变风量系统的分析[C].中国能源学会.第三届中国能源科学家论坛论文集.2011:1634-1637
[10] 李琳琳,姚若玉.变风量空调系统控制方法综述[J].渭南师范学院学报,2003,18(2):30-33.
[11] 杨国忠,李康.VAV系统中定静压与变静压控制分析[J].智能建筑与城市信息,2005,(9):93-95.
[12] 王述彦,师宇,冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术,2011,30(1):166-172.
[13] 郑滨辉.模糊控制在中央空调变频节能及其末端房间的应用研究[D].浙江:浙江大学,2012.
[14] 苏明,陈伦军,林浩.模糊PID控制及其MATLAB仿真[J].现代机械,2004,(4):51-55.
[15] 杨洪祥.基于广义预测控制的变风量空调末端仿真与控制研究[D].北京:北京工业大学,2009.
[16] 王乘熙,李泽,郝万君.MPC在空调系统中的应用综述[J].现代信息科技,2019,3(21):43-45.
[17] Gongsheng Huang. Model predictive control of VAV zone thermal systems concerning bi-linearity and gain nonlinearity[J]. Control Engineering Practice,2011,19(7).
[18] 黄孟伟.基于状态空间的多区域VAV空调系统建模及其优化控制研究[D].上海:上海交通大学,2014.
备注:本文收录于《建筑环境与能源》2021年4月刊 总第42期(第二十届全国暖通空调模拟学术年会论文集)。版权归论文作者所有,任何形式转载请联系作者。